
Onder Erin, Ph.D.
MRI-powered Magnetic Robotics
Problem Definition:
Magnetic robotics can enable ultra-minimally invasive surgeries by moving small magnetic devices inside the body—without any incisions or physical connections. However, two major challenges slow down adoption:
Tracking the robot – Since the surgeon can’t directly see inside the body, we need an imaging system to track the robot’s position in real time.
Hardware complexity – Most magnetic actuation systems require large, custom-built electromagnetic coil setups, which take up space and make them less practical for use in operating rooms.
Hypothesis:
MRI machines are already widely available in hospitals and can:
Capture 3D images inside the body in real time.
Produce strong, controllable magnetic fields.
If we could use a single MRI machine for both imaging and actuation, we could track and move magnetic robots inside the body without introducing bulky new equipment.
Solution:
I converted a commercial MRI scanner into an autonomous robotic manipulation platform that:
Provides real-time image feedback for closed-loop control.
Receives intuitive user commands from a Custom-GUI.
Generates actuation forces to move magnetic objects inside the body.
Autonomously controls the motion of a magnetic rigid body object at high precision.
This system allows real-time, precise control of position and orientation for magnetic devices—enabling navigation through the body in an ultra-minimally invasive way.
I also built a teleoperation mode so surgeons can monitor live MRI scans and guide the robot using a standard handheld controller.
MRI-powered Robot: Autonomous Trajectory Following with Image Feedback
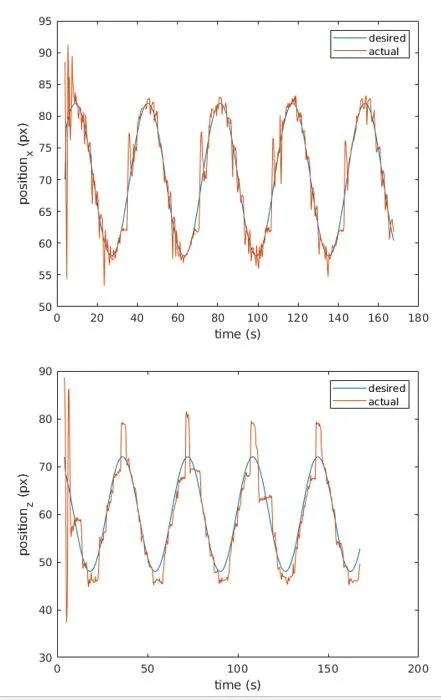
Autonomous Circular Trajectory Tracking via 1D MS-SET Scans as Feedback
Tele-operated Wireless Capsule Endoscopy Robot Powered by an MRI Device
Closed-loop Feedback Control Demonstrations
Autonomous Position and Orientation Control
MRI Device for Dual Usage: Simultaneous Monitoring and Actuation of a Magnetic Robot via an MRI Device
MRI-powered Teleoperatively Controlled Magnetic Robot for Hyperthermia
My Mission
Making a difference in people’s life by developing the next generation robotic systems.